Basic Electrical and Electronics Engineering: Unit II: Electrical Machines
Characteristics of DC Motor
The characteristic of dc motor shows the relationship between the following quantities.
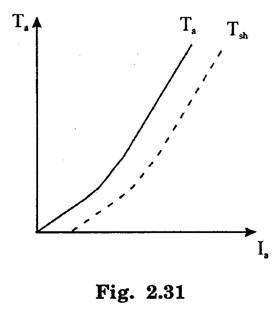
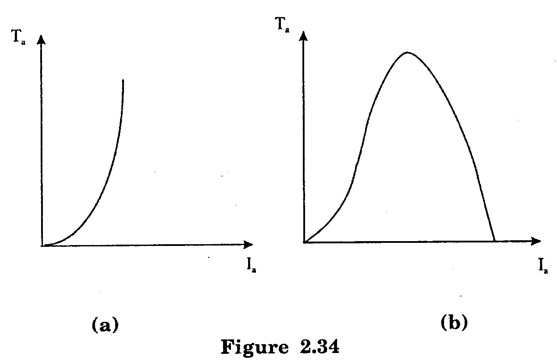
CHARACTERISTICS OF DC MOTOR The characteristic of dc motor shows the relationship between the following quantities. i) Torque and armature current (T Vs Ia). It is also known as the electrical characteristic. ii) Speed and armature current (N Vs Ia) ü) Speed and the armature torque (N Vs Ta). It is also known as mechanical characteristics. The above characteristics can be obtained for all types of motors with the help torque and speed equations. 1. Characteristics of DC Shunt Motor i) Ta Vs Ia Characteristics The magnetic flux ϕ, reduces slightly on heavy loads only. Hence, flux can be considered to remain constant. Ta ∝ Ia Therefore, Ta Vs Ia characteristics is a straight line characteristics as shown in figure 2.30 (a). ii) N Vs Ia Characteristics For shunt motor ϕ is almost constant on load. ⸫ N ∝ Eb when load increases, Ia increases, but the drop IaRa is very small as Ra is very small. Hence there will be a small change in speed from no-load to full load as illustrated in figure 2.30 (b). The drop in speed from no-load to full-load is 5 to 10% of no-load speed. Shunt motor is a constant speed motor. iii) N Vs Ta Characteristics This can be deduced from the above two characteristics and is shown in figure 2.30(c.) i) Ta Vs Ia Characteristics Ta ∝ fIa In series motor ϕ ∝ Ise and Ise = Ia At lights loads, Ta ∝ Ia2 (prior to saturation of fields poles) At heavy loads, Ta ∝ Ia (after saturation of magnetic poles, ϕ is constant for any value of Ia) Hence, Ta vs Ia Characteristics is a parabola prior to saturation, and it is a straight line beyond saturation point, as shown in figure 2.31. On heavy loads, the series motor employs higher starting torque as Ta ∝ Ia2 prior to saturation. ii) N vs Ia Characteristics :- Variation in Eb is very small with variations in load. So it can be regarded as constant on all loading. The speed - armature current characteristic is a rectangular parabola as shown in figure 2.32. On light load or on no-load; the armature current Ia is very small, and hence the motor will run at dangerously high speeds. Hence, series motor should always be started with some load on it. Series motor is a variable speed motor. iii) N vs Ta Characteristics From the above two characteristics, this characteristics can be deduced, as shown in figure 2.33 Cumulative compound motor The fluxes which are produced by the two field windings, aid each other. On light loads, the torque developed is similar to that in a shunt motor. On heavy loads, the total flux increases and torque increases rapidly as shown in figure 2.34(a) Differential Compound motors On no-load and light loads, the effect of series field flux is small. Hence, torque produced is as that in a shunt motor. On heavy loads the effect of series field is more and reduces the net flux. Hence the torque developed is reduces and may become zero. On further loading the series field dominates the main field, torque is developed in opposite direction and motor will run in the opposite direction. The characteristics are shown in figure 2.34(b).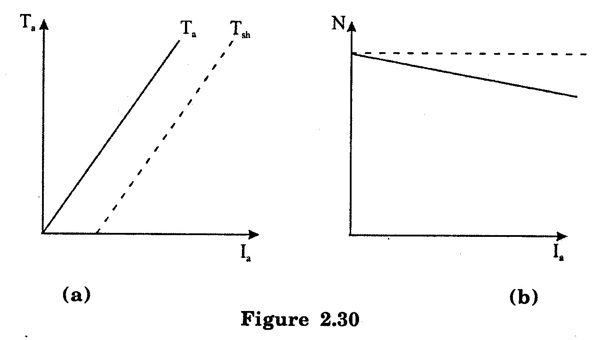



2. Characteristics of DC Series Motors



3. Characteristics of compound motors
Basic Electrical and Electronics Engineering: Unit II: Electrical Machines : Tag: : - Characteristics of DC Motor
Basic Electrical and Electronics Engineering: Unit II: Electrical Machines
Under Subject
Basic Electrical and Electronics Engineering
BE3251 2nd semester Mechanical Dept | 2021 Regulation | 2nd Semester Mechanical Dept 2021 Regulation
Basic Electrical and Electronics Engineering
BE3251 2nd Semester CSE Dept 2021 | Regulation | 2nd Semester CSE Dept 2021 Regulation
Related Subjects

Professional English II
HS3251 2nd Semester 2021 Regulation | 2nd Semester Common to all Dept 2021 Regulation
Statistics and Numerical Methods
MA3251 2nd Semester 2021 Regulation M2 Engineering Mathematics 2 | 2nd Semester Common to all Dept 2021 Regulation
Engineering Graphics
GE3251 eg 2nd semester | 2021 Regulation | 2nd Semester Common to all Dept 2021 Regulation
Physics for Electrical Engineering
PH3202 2nd Semester 2021 Regulation | 2nd Semester EEE Dept 2021 Regulation
Basic Civil and Mechanical Engineering
BE3255 2nd Semester 2021 Regulation | 2nd Semester EEE Dept 2021 Regulation
Electric Circuit Analysis
EE3251 2nd Semester 2021 Regulation | 2nd Semester EEE Dept 2021 Regulation
Physics for Electronics Engineering
PH3254 - Physics II - 2nd Semester - ECE Department - 2021 Regulation | 2nd Semester ECE Dept 2021 Regulation
Electrical and Instrumentation Engineering
BE3254 - 2nd Semester - ECE Dept - 2021 Regulation | 2nd Semester ECE Dept 2021 Regulation
Circuit Analysis
EC3251 - 2nd Semester - ECE Dept - 2021 Regulation | 2nd Semester ECE Dept 2021 Regulation
Materials Science
PH3251 2nd semester Mechanical Dept | 2021 Regulation | 2nd Semester Mechanical Dept 2021 Regulation
Basic Electrical and Electronics Engineering
BE3251 2nd semester Mechanical Dept | 2021 Regulation | 2nd Semester Mechanical Dept 2021 Regulation
Physics for Civil Engineering
PH3201 2021 Regulation | 2nd Semester Civil Dept 2021 Regulation
Basic Electrical, Electronics and Instrumentation Engineering
BE3252 2021 Regulation | 2nd Semester Civil Dept 2021 Regulation

Physics for Information Science
PH3256 2nd Semester CSE Dept | 2021 Regulation | 2nd Semester CSE Dept 2021 Regulation
Basic Electrical and Electronics Engineering
BE3251 2nd Semester CSE Dept 2021 | Regulation | 2nd Semester CSE Dept 2021 Regulation

Programming in C
CS3251 2nd Semester CSE Dept 2021 | Regulation | 2nd Semester CSE Dept 2021 Regulation