Theory of Machines: Unit I: Kinematics of Mechanisms
velocity analysis by instantaneous centre method
instantaneous centre of rotation
In many cases, a body has simultaneously a motion of rotation as well as translation.
III. VELOCITY ANALYSIS BY INSTANTANEOUS CENTRE METHOD
INSTANTANEOUS CENTRE OF ROTATION
Concept:
• The
combined motion of rotation and translation of a link in the mechanism may be
assumed to be a motion of pure rotation about some centre I, known as the instantaneous
centre of rotation or virtual centre of rotation.
• Illustration:
In many cases, a body has simultaneously a motion of rotation as well as
translation. For example, the wheels of a car moving on road surface have
rotary as well as translatory motion.
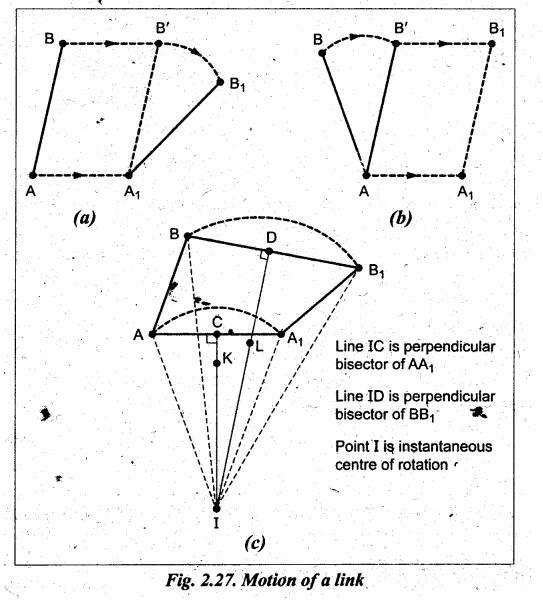
Consider
a rigid link AB which moves from its initial position AB to A1B1
as shown in Fig.2.27(a). AB has reached to A1B' position through
translatory and from A1B' to A1B1 through
rotary motion. In Fig.2.27(b), the link AB has first the motion of rotation
from AB to AB' about A and then the motion of translation from AB′ to A1B1.
Thus A1B1 which is the final position of AB, is the
combined effect to translatory and rotary motions.
This
combined motion of rotation and translation of the link AB may be assumed to be
a motion of pure rotation about some centre I, known as the instantaneous
centre of rotation.
• Location
of position of instantáneous centre: The
position of instantaneous centre may be located as discussed below:
Refer
Fig.2.27(c), join A to A1 and B to B1. Draw perpendicular
bisectors from AA1 and BB1 to intersect at point I. When
the point A of the rigid link moves from A to A1 position, it is
assumed that the rotary motion takes place about point K on the bisector of CK.
Similarly, when B moves to B1, the rotary motion can be expected
about any point L on the bisector DL. As the bisector intersect at point I, it
is the point about which the link rotates. Point I is known as the
instantaneous centre of rotation.
• The position of
instantaneous centre changes with the changed position of the link AB. There
will be different instantaneous centres for different positions of link AB.
VELOCITY OF A POINT ON A LINK BY INSTANTANEOUS CENTRE METHOD
✓ Consider a link AB shown in Fig.2.28. Let VA and vg be the absolute velocities of points A and B on the link.
Let us assume that both the magnitude and velocity of point A is known, while the direction of velocity of point B only is known (but magnitude is unknown).
The instantaneous centre of I of the link AB at this instant can be located by drawing perpendiculars to the directions of VA and vg, as shown in Fig.2.28. The intersecting point is the required instantaneous centre I.
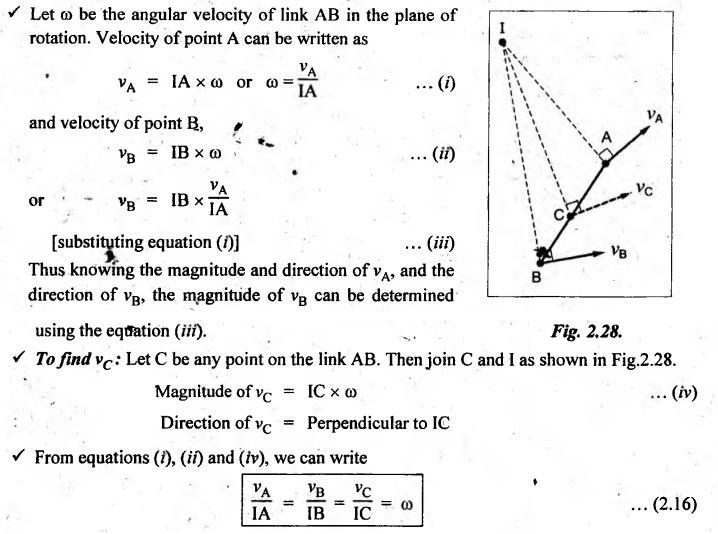
From equation (2.16), it can be stated that the magnitudes of the velocities of the points on a link is directly proportional to their distance from the instantaneous centre. The direction of their velocities is perpendicular to the line joining them with the instantaneous centre.
NUMBER OF INSTANTANEOUS CENTRES IN A MECHANISM
• It may be noted that there will be one instantaneous centre for two links having relative motion between them. Therefore, the number of instantaneous centres in a mechanism having n links will be equal to possible pairs of two links taken at a point.
• Mathematically,
the number of instantaneous centres (N) in a mechanism is given by

where
n
= Number of links
Theory of Machines: Unit I: Kinematics of Mechanisms : Tag: : instantaneous centre of rotation - velocity analysis by instantaneous centre method
Related Topics
Related Subjects

Theory of Machines
ME3491 4th semester Mechanical Dept | 2021 Regulation | 4th Semester Mechanical Dept 2021 Regulation