Basic Electrical and Electronics Engineering: Unit V: Measurements and Instrumentation
Types of Measuring Instruments
Absolute instruments give the quantity to be measured interms of an instrument constant and its deflection (e.g.,) tangent galvanometer.
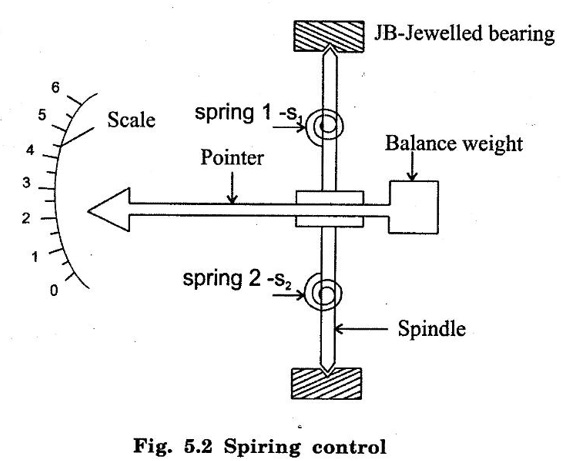
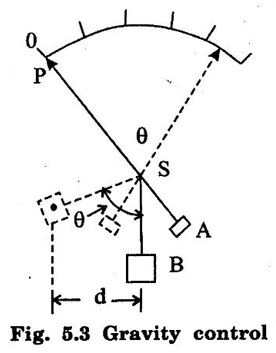
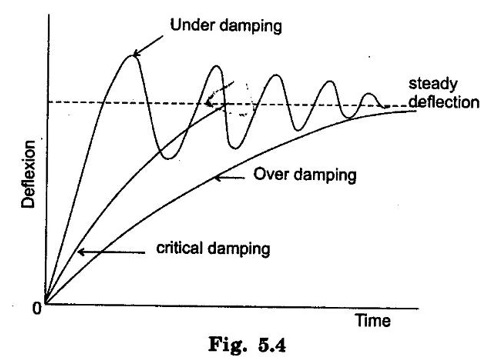
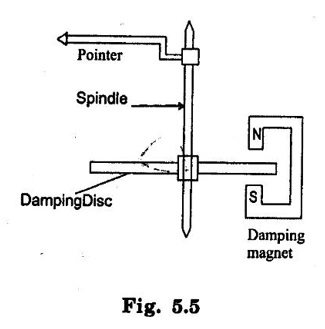
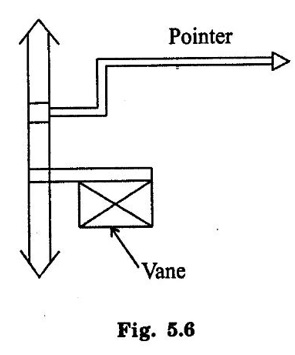
TYPES OF MEASURING INSTRUMENTS Absolute instruments give the quantity to be measured interms of an instrument constant and its deflection (e.g.,) tangent galvanometer. It gives the value of current interms of the tangent of deflection produced by the current, the radius, the number of turns of wire used and the horizontal component of earths field. The value of electrical quantity to be measured can be determined from the deflection of the instruments only when they have been pre-calibrated by comparison with an absolute instrument. The principle of working of all electrical measuring instruments depends on the various effects [magnetic, heating, chemical, electromagnetic thermal and electrostatic] of electric current or voltage. These can be classified as follows. 1. Indicating instruments 2. Recording instruments 3. Integrating instruments It indicate the instantarfeous value of the electrical quantity being measured at the time of measurement. (e.g.,) Ammeter, voltmeter, wattmeter. A continuous record of the variations in the quantity being measured over a selected period of time. (e.g.,) Plotter. Measure and register by a set of dials and pointers either the total amount of electrical energy (in watt hours or KWh) or the total quantity of electricity (in ampere- hours) supplied to a circuit in a given time. (e.g.,) energy meter, speedometer. An indicating instrument essentially consists of a moving system pivoted in jewel bearings. A pointer is attached to the moving system which indicates the electrical quantity to be measured, on a graduated scale. In order to ensure the proper operation of the indicating instruments, the following three torques are required. i. Deflecting (or operating) torque. ii. Controlling (or restoring) torque. iii. Damping torque The deflecting torque is produced by utilizing the various effects (magnetic effect, induction effect, thermal effect, hall effect) of electric current or voltage, and causes the moving system to move and hence the pointer to move from zero position. The controlling torque is produced by spring or gravity and opposes the deflecting torque. The pointer comes to rest at a position, where these two opposing torques are equal. Damping torque is provided by air friction or eddy currents. It ensures that, the pointer comes to the final position, without oscillations, thus enabling accurate and quick readings to be taken. Now let us discuss the above three torques in detail. (i) Deflecting torque(Td) :- The deflecting torque causes the moving system to move from zero position to indicate the value of the electrical quantity being measured on a graduated scale. The actual method of producing the deflecting torque depends upon the type of instrument. (ii) Controlling torque(Tc):- If the deflecting torque were acting alone, the pointer will continue to move indefinitely and would swing over to the maximum deflected position irrespective of the magnitude of the electrical quantity to be measured. This necessitates providing some form of controlling or opposing torque. This controlling torque should increase with the deflection of the moving system. The pointer will be brought to rest at a position where the two opposing torques are equal. ie, Td = Tc. The controlling torque performs two functions. a) It increases with the deflection of the moving system so that, the final position of the pointer on the scale will be according to the magnitude of the electrical quantity to be measured. b) It brings the pointer back to zero position, when the deflecting torque is removed. If it were not provided, the pointer once deflected would not return to zero position on removing the deflecting torque. The controlling torque can be provided, ❖ by using one or more springs. The corresponding instrument is termed as spring controlled instruments. (commonly used in modern instruments). ❖ by the weight of moving parts. Such instruments are known as gravity controlled instruments.(not much used in modern instruments). Usually the control torque is affected by spring control (or) gravity control. (a) Spring control: In spring control system, a hair spring is attached to the moving system of the instrument as shown in figure 5.2. It is made up of phosphor- bronze. The spring is twisted in opposite direction with deflection of the pointer. The twist in spring causes control torque (Tc) which is directly proportional to the angle (θ) of deflection of the moving system. (i.e.,) TC ∝ θ when deflecting torque (Td) and controlling torque (Tc) are equal, the pointer comes to a rest position. (i.e.) Tc - Td The spring are made up of such material which has following characteristics. 1. Spring should be made up of non-magnetic material. 2. They are not subject to much fatique. 3. They have good electrical conductivity, low resistance, low temperature - resistance coefficient. (b) Gravity control. Figure 5.3 shows gravity control for indicating instruments, in which two weights A and B are attached to the spindle S of the moving system. The main function of weight A is to balance the weight of the pointer P. The controlling torque is obtained by weight B. This weight is called control weight. The weight A is attached to the moving system for zero adjustment and balancing purpose. This weight is called Balance Weight. When the pointer is at zero position, the weight B hangs vertically downwards, when current flows through the instrument, the spindle rotates by angle ϕ shown by dotted position in figure 5.3. However, if the deflecting torque lifts the controlling weight from its original position by angle θ thus providing a control torque equal to the product of weight B and distance d. Hence the controlling torque is proportional to the sine of the angular deflection. 1. It is cheap and not affected by temperature variations. 2. It is not subject to fatigue. 3. It is not deteriorate with time. 1. The scale is not uniformly divided but cramped at its lower end. 2. The instrument has to be kept vertical. (iii) Damping torque (Tdamp):- If the moving system is acted upon by deflecting and controlling torques alone, then due to inertia, the pointer will oscillate about its final deflected position for some time before coming to rest. This oscillation makes it difficult to obtain quick and accurate reading. In order to avoid these oscillations of the pointer and to bring it quickly to its final deflected position, a damping torque is provided in the indicating instruments. The damping do not affect the stationary pointer, as the damping torque acts only when the pointer is in motion and always opposes the motion. The damping torque in indicating instruments can be provided by, ● Air- friction ● Fluid friction ● Eddy currents The behaviour of the moving system is decided by the degree of damping. The figure 5.4 shows the graph for under damping, over damping, and critical damping. Under damped moving system:- The pointer will oscillate about the final position for some time, before coming to rest. Over damped:- The pointer will become slow and lethargic. Critically damped/ dead Beat:- The degree of damping is so that, the pointer comes up to the correct reading quickly without passing beyond it or oscillating about it. Eddy current damping is the most efficient form of damping. The essential components in this type of damping are a permanent magnet and a light conducting the disc, usually an aluminium. Figure 5.5 illustrates one form of eddy current damping. where a thin disc of aluminium is mounted on a spindle which can move between the poles of a permanent magnet. When the spindle moves clockwise, the disc cut the magnetic flux between the poles of permanent magnet. At thereby an emf is induced in the disc. The emf induced in the disc causes eddy currents. Eddy currents flowing in the disc produce the necessary damping force. The flow of eddy current in a direction opposite to that of the flow of motion of the disc. With constant field strength, the damping torque produced by eddy currents is proportional to the velocity of the conductor. This type of damping is used for permanent magnet moving coil and induction type instruments. The arrangement shown in Fig. 5.6 consists of a light aluminium vane, is attached to a spindle S. The vane V can move in the sector-shaped air chamber. The chamber also carries a cover plate at the top. The tendency of moving system to oscillate about its final steady position is damped by the action of air on the vane. The aluminium vane should not touch the air-chamber walls else a serious error introduced in the deflection of the instrument. Now, with the motion, the vane displaces air and thereby a damping force is created on the vane that produces a torque (damping) on the spindle. When the movement is quicker the damping force is greater; when the spindle is at rest, the damping force is zero.1. Absolute Instruments
2. Secondary Instruments
1. Indicating Instrument
2. Recording Instrument
3. Integrating Instruments
1. Essential of indicating instruments
Advantages of Gravity control
Disadvantages of Gravity control
(1) Eddy current damping
(2) Air Damping
Basic Electrical and Electronics Engineering: Unit V: Measurements and Instrumentation : Tag: : - Types of Measuring Instruments
Related Topics
Related Subjects
Basic Electrical and Electronics Engineering
BE3251 2nd semester Mechanical Dept | 2021 Regulation | 2nd Semester Mechanical Dept 2021 Regulation
Basic Electrical and Electronics Engineering
BE3251 2nd Semester CSE Dept 2021 | Regulation | 2nd Semester CSE Dept 2021 Regulation