Theory of Machines: Unit I: Kinematics of Mechanisms
Types of joints in a chain
Kinematics of Mechanisms - Theory of Machines
The general types of joints in a chain are shown in Fig. 1.20.
TYPES OF JOINTS IN A CHAIN
The
general types of joints in a chain are shown in Fig. 1.20.
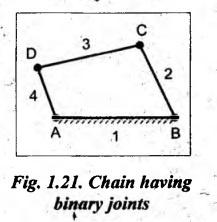
1. Binary Joint
• If two links are joined
at the same connection, the joint is known as binary joint.
• For example, a kinematic
chain shown in Fig.1.21, has four binary joints at A, B, C and D.
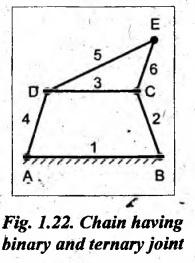
2. Ternary Joint
• If three links are joined
at the same connection, the joint is known as ternary joint.
• For example, a kinematic
chain shown in Fig.1.22, has three binary joints at A, B and E, and two ternary
joints at C and D.
• One ternary joint is equivalent
to two binary joints.
• The equivalent number of
binary joints for the chain shown in Fig.1.22, is given by

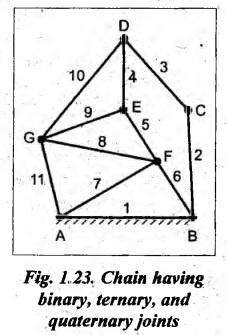
3. Quaternary Joint
• If four links are joined
at the same connection, the joint is known as quaternary joint.
• For example, a kinematic
chain shown in Fig.1.23, has one binary joint at C, four ternary joints at A,
B, D and E, and two quaternary joints at F and G.
• One quaternary joint is
equivalent to three binary joints.
• The equivalent number of
binary joints for the chain shown in Fig. 1.23, is given by

Theory of Machines: Unit I: Kinematics of Mechanisms : Tag: : Kinematics of Mechanisms - Theory of Machines - Types of joints in a chain
Related Topics
Related Subjects

Theory of Machines
ME3491 4th semester Mechanical Dept | 2021 Regulation | 4th Semester Mechanical Dept 2021 Regulation