Theory of Machines: Unit I: Kinematics of Mechanisms
Review and summary
Kinematics of Mechanisms - Theory of Machines
The determination of motion characteristics such as displacement, velocity and acceleration of various links for a given input motion is known as kinematic analysis.
REVIEW AND SUMMARY
• The determination of motion
characteristics such as displacement, velocity and acceleration of various
links for a given input motion is known as kinematic analysis.
• Important methods of
determining the kinematic analysis are:
1. Graphical method:
(i) Relative velocity
method, and
(ii) Instantaneous
centre method.
2. Analytical or
algebraic method
• All the abovesaid
methods are discussed widely with sufficient example problems, in this chapter.
• Configuration diagram
is a skeleton or a line diagram which represents a machine or a mechanism.
•
Velocity
of any point on a link with respect to another point on the same link is always
perpendicular to the line joining these points on the configuration diagram.
• Two components of
acceleration are:
(i) Radial or
centripetal component: It acts in the
direction parallel to the link and its direction is towards the centre of
rotation.

(ii) Tangential
component: It acts in the direction
perpendicular to the link.
atBA
= α × Length of link AB = α × AB
(iii) Total
acceleration = Vector sum of radial and tangential accelerations
aBA = ar
BA + at BA
• If a link rotates at a
constant angular velocity, then the tangential component of acceleration at
become zero.
•
If a
link (like slider) moves in a straight line, then the radial component of
acceleration ar becomes zero.
• When a point on one
link is sliding along another rotating link, then the point is known as coincident
point.
• Whenever a coincident
point exists in a mechanism, we have to consider Coriolis component of
acceleration.
• Magnitude of Coriolis
component of acceleration, ac = 2 vsω
• The combined motion of
rotation and translation of link may be assumed to be a motion of pure motion
about some centre I, known as instantaneous centre.
•
Number
of instantaneous centres in a mechanism (N) is given by, N = n(n – 1) / 2 where
n = Number of links.
• Kennedy's theorem
states that if three bodies move relatively to each other, they have
instantaneous centres and lie on a straight line.
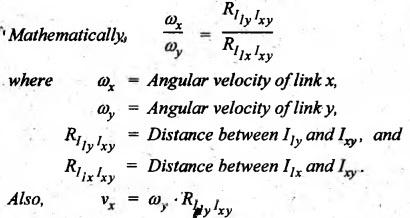
• The angular velocity
ratio theorem states that the angular velocity ratio of two links relative to a
third link is inversely proportional to the distances of their common
instantaneous centre from the respective centres of rotation.
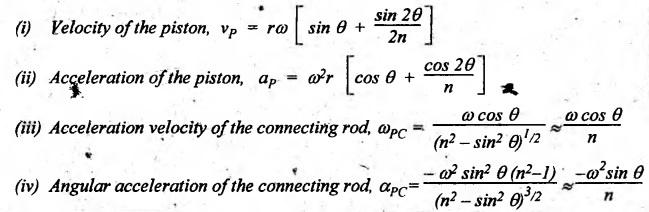
• Analytical method for
velocity and acceleration of slider-crank mechanism:
Theory of Machines: Unit I: Kinematics of Mechanisms : Tag: : Kinematics of Mechanisms - Theory of Machines - Review and summary
Related Topics
Related Subjects

Theory of Machines
ME3491 4th semester Mechanical Dept | 2021 Regulation | 4th Semester Mechanical Dept 2021 Regulation