Theory of Machines: Unit I: Kinematics of Mechanisms
kinematic chain
Kinematics of Mechanisms - Theory of Machines
A kinematic chain is defined as the combination of kinematic pairs in which each link forms a part of two kinematic pairs and the relative motion between the links is either completely constrained or successfully constrained.
KINEMATIC CHAIN
• A kinematic chain is
defined as the combination of kinematic pairs in which each link forms a part
of two kinematic pairs and the relative motion between the links is either
completely constrained or successfully constrained.
• A chain may be locked,
constrained and unconstrained.
• A kinematie chain having
four links is known as a simple kinematic chain and a kinematic
chain having more than four links is known as a compound kinematic chain.
• Closed and open kinematic
chain:
■
When links are connected in a sequence, with first link connected to the last
(forming a closed loop), then the chain is called as closed kinematic
chain.
■
When links are connected in a sequence, with first link not connected to the
last (forming an open loop), then the chain is called as open kinematic
chain.
1. Conditions to form a Kinematic Chain
• The required
equations/conditions to form a kinematic chain are:
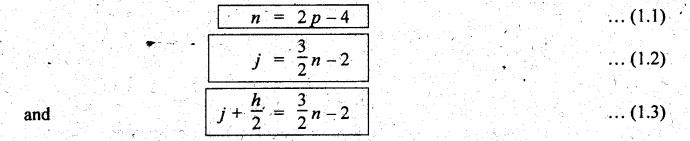
where
n
= Number of links,
p
= Number of pairs,
j
= Number of binary joints, and
h
= Number of higher pairs.
• If above equations are
satisfied, then the assemblage of links form a kinematic chain.
• The equations (1.1) and
(1.2) can be applied only for kinematic chains having lower pairs, whereas the
equation (1.3) can be applied for kinematic chains having lower and/or higher
pairs.
• It may be noted that when
h = 0 (i.e., no higher pair, only lower pairs) in-équation (1.3), we get j = 3/2 n − 2, which is
exactly the same as that of equation (1.2).
2. A.W. Klien's Criterion of Constraint to Determine Nature of Chain
• A.W. Klien's criterion of
constraint is used to determine the nature of chain, i.e., whether the chain is
a locked chain (i.e., structure) or a constrained chain or an unconstrained
chain.
• According to A. W.
Klien's criterion of constraint, in equation (1.3) [or in equations
(1.1) and (1.2)],
(i) If L.H.S >
R.H.S., then the given chain is called locked chain or structure.
(ii) If L.H.S. =
R.H.S., then the given chain is called constrained kinematic
chain.
(iii) If L.H.S.
< R.H.S., then the given chain is called unconstrained
kinematic chain.
Example 1.1
Show that a combination of three links cannot form a kinematic
chain.
Solution:
Consider
an assemblage of three links AB, BC and CA which are pin jointed at A, B and C,
as shown in Fig.1.18.
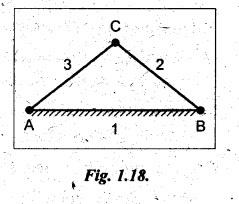
From
Fig.1.18, we can write
Number
of links, n = 3.
Number
of pairs, p = 3
Number
of joints, j = 3
Number
of higher pairs, h = 0
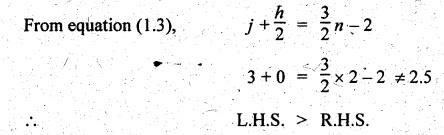
Since
L.H.S. > R.H.S., therefore the given three links chain is not a
kinematic chain; it is a locked chain or structure. Ans. ![]()
Note
Locked chain forms a
rigid frame which is used in bridges and trusses.
Example 1.2
Fig.1.19 shows the chains with four links, five links and six
links. Determine whether they are locked, constrained or unconstrained
kinematic chain.
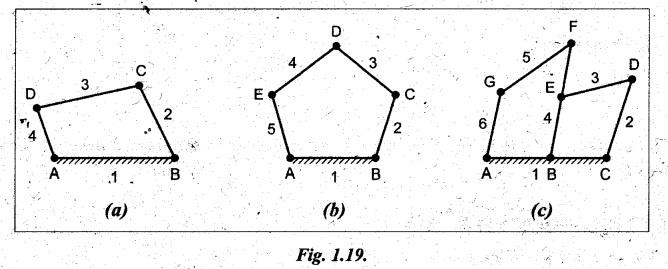
Solution:
Case (a): Four link
chain
Referring
to Fig.1.19(a), we can write
n
= 4; p = 4; j = 4; and h = 0.
From
equation (1,3),
Since
L.H.S.= R.H.S., therefore the four-bar chain is a constrained kinematic
chain. Ans. ![]()
Case (b): Five link
chain
Referring
to Fig.1.19(b), we can write
n
= 5; p = 5; j = 5; and h = 0.
Since
L.H.S. < R.H.S., therefore the five bar chain is an unconstrained
kinematic chain. Ans. ![]()
Case (c): Six link
chain
Referring
to Fig.1.19(c), we can write
n
= 6; p = 5; j = 7; and h = 0.
Since
L.H.S. = R.H.S., therefore the six bar chain is a constrained kinematic
chain. Ans.![]()
Theory of Machines: Unit I: Kinematics of Mechanisms : Tag: : Kinematics of Mechanisms - Theory of Machines - kinematic chain
Related Topics
Related Subjects

Theory of Machines
ME3491 4th semester Mechanical Dept | 2021 Regulation | 4th Semester Mechanical Dept 2021 Regulation