Theory of Machines: Unit I: Kinematics of Mechanisms
four-bar chain (or quadratic cycle chain)
A four-bar chain is the most fundamental and the simplest kinematic chain.
FOUR-BAR CHAIN (OR QUADRATIC CYCLE CHAIN)
• A four-bar chain is the
most fundamental and the simplest kinematic chain. It consists of four links
and four turning pairs, as shown in Fig.1.26.
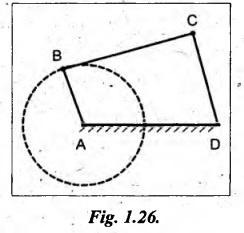
• Since the four-bar chain
looks like a cycle frame, it is also known as quadric cycle chain.
• Four links of a four-bar
chain are:
1. Frame:
The fixed link is known as frame (link AD in Fig.1.26)
2. Crank (or driver):
A link that makes complete revolutions is called as crank (link AB in Fig.
1.26).
3. Coupler (or
connecting rod): The link opposite to the
fixed link is known as coupler (link BC in Fig.1.26). In other words, the
coupler is the link which is not connected to the frame.
4. Lever (or rocker or
follower): The link which makes oscillation
(ie., a partial rotation) is known as lever (link CD in Fig.1.26).
• In most practical
applications, the electric motors are used to drive the mechanisms. In such
case, one of the link must be a crank to receive power from motor.
• For four-barin, Grashof's
law is used to test whether any of the links in the chain can be a crank.
Theory of Machines: Unit I: Kinematics of Mechanisms : Tag: : - four-bar chain (or quadratic cycle chain)
Related Topics
Related Subjects

Theory of Machines
ME3491 4th semester Mechanical Dept | 2021 Regulation | 4th Semester Mechanical Dept 2021 Regulation