Theory of Machines: Unit I: Kinematics of Mechanisms
Degrees of freedom (or mobility) of a mechanism
Kinematics of Mechanisms - Theory of Machines
The mobility or number of degrees of freedom is one of the main concerns in the design or analysis of a mechanism.
DEGREES OF FREEDOM (OR MOBILITY) OF A MECHANISM
• The mobility or number of
degrees of freedom is one of the main concerns in the design or analysis of a
mechanism.
• Definition:
The degree of freedom is the number of independent parameters required to
specify the location of every link within a mechanism.
• The mobility of a
mechanism is defined as the number of inputs required to produce the
constrained motion of the mechanism.
• Thus essentially both
degrees of freedom and mobility are the same.
1. Planar Mechanism Vs Spatial Mechanism
1. Planar Mechanism
• A mechanism formed when
all the links of the mechanism lie in the same plane is known as planar
mechanism.
• Thus a planar
mechanism can have maximum of three degrees of freedom.
• It may be noted that most
of the mechanisms dealt in this subject are planar mechanisms.
2. Spatial Mechanism
• A mechanism formed when
the links of the mechanism lie in different planes is known as spatial
mechanism.
• Spatial mechanisms have
special geometric characteristics. To describe the motion of such mechanisms,
more than one plane would be required. For example, motions of robot arm,
crane, and Hooke's joint.
• A spatial mechanism can
have maximum of six degrees of freedom
(three translatory motions in X, Y and Z axes, and three rotational motions
about X, Y and Z axes).
2. Kutzbach Criterion for Mobility of Planar Mechanisms
• The Kutzbach criterion to
find degrees of freedom of a planar mechanism in
terms of number of lower and higher pairs is given by

where
n = Number of links,
l
- Number of lower pairs,
=
j, Number of binary joints, and
h
= Number of higher pairs
3. Kutzbach Criterion for Mobility of Spatial Mechanisms
Degrees
of freedom of a mechanism in space can be determined with the help of following
Kutzbach criterion.

where
n = Number of links in the mechanism,
p1
= Number of pairs having 1 DOF,
p2
= Number of pairs having 2 DOF,
p3
= Number of pairs having 3 DOF,
p4
= Number of pairs having 4 DOF, and
p5
= Number of pairs having 5 DOF
4. Grubler's Criterion for Planar Mechanisms
• Grubler's criterion is
applied to mechanisms with only single degree of freedom joints where the
overall mobility of the mechanism is unity.
• Substituting h = 0
and n = 1 into Kutzbach criterion for planar equation. i.e., in equation
(1.4), we get

The
above equation is known as Grubler's criterion for planar mechanisms
with constrained motion.
5. Grubler's Criterion for Spatial Mechanisms
• If we have all single
degree of freedom pairs and mobility of 1, then the Kutzbach criterion is
called as Grubler's criterion for spatial mechanisms:
• Substituting n = 1,
p2 = p2 = ……= p5 = 0 into
Kutzbach criterion for spatial equation i.e., in equation (1.5), we get

The
above equation is known as Grubler's criterion for spatial mechanisms.
Example 1.3
Using Kutzbach criterion, find the degrees of freedom for the
following kinematic chains: (a) Three-bar chain; (b) Four-bar chain; (c) Cam
with roller follower; and (d) Cam with knife-edge follower.
Solution:
The
Kutzbach criterion for planar mechanism is given by
DOF
= 3 (n - 1) – 2l - h
where
n = Number of links in the mechanism,
l
= Number of lower pairs,
=
j, Number of binary joints, and
h
= Number of higher pairs
(a)
For three-bar chain: Refer to Fig. 1.24(a).
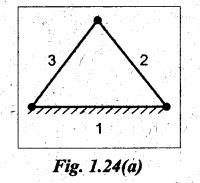
Number
of links, n = 3
Number
of binary joints, j = 3
⸫
Number of lower pairs l = j = 3
Number
of higher pairs, h = 0
⸫
DOF = 3 (3-1)-2 (3) - 0 = 0 Ans. ![]()
DOF
= 0
means the three-bar chain forms a structure and no relative
motion between the links is possible
(b)
For four-bar chain: Refer to Fig. 1.24(b).
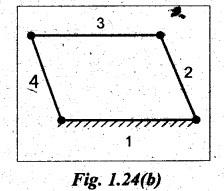
Number
of links, n = 4
Number
of binary joints, j = 4
⸫
Number of lower pairs l = j = 4
Number
of higher pairs, h = 0
⸫
DOF = 3(4 - 1) – 2 (4) – 0 = 1 Ans. ![]()
DOF
= 1 means the four-bar chain can be driven by
a single input metion,
(c)
For cam with roller follower: Refer to Fig.
1.24(c).
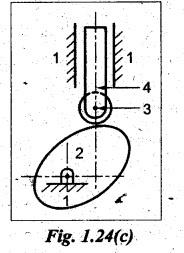
Number
of links, n = 4
Number
of binary joints, j = 3
⸫
Number of lower pairs l = j = 3
Number
of higher pairs, h = 1
[ ⸪ roller and cam form higher pair]
⸫
DOF = 3(4 - 1) – 2 (3) – 1 = 2 Ans. ![]()
DOF
= 2 means two separate input motions
are necessary to produce constrained motion for the mechanism.
(d)
For cam with knife-edge follower:
Refer to Fig.1.24(d).
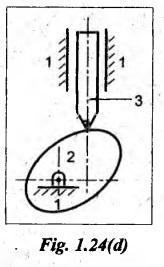
Number
of links, n = 3
Number
of binary joints, j = 2
⸫
Number of lower pairs l = j = 2
Number
of higher pairs, h = 1
[ ⸪ knife-edge and cam form higher pair]
⸫
DOF = 3(3 - 1) – 2 (2) – 1 = 1 Ans. ![]()
DOF
= 1 means the mechanism can be driven by a single
input motion.
Theory of Machines: Unit I: Kinematics of Mechanisms : Tag: : Kinematics of Mechanisms - Theory of Machines - Degrees of freedom (or mobility) of a mechanism
Related Topics
Related Subjects

Theory of Machines
ME3491 4th semester Mechanical Dept | 2021 Regulation | 4th Semester Mechanical Dept 2021 Regulation