Theory of Machines: Unit I: Kinematics of Mechanisms
constrained motions
Kinematics of Mechanisms - Theory of Machines
The three types of constrained motions in kinematic pairs are given in Fig. 1.6.
CONSTRAINED MOTIONS
The
three types of constrained motions in kinematic pairs are given in Fig. 1.6.

1. Completely Constrained Motion
• When the relative motion
between two links is limited to a definite direction, then the motion is said
to be a completely constrained motion.
• In other words, completely
constrained motion results in single degree of motion. • Practical examples: (i) Square bar
moving in square hole (Fig.1.7(a)), and
(ii)
A shaft with collars at its ends turning in a round hole (Fig. 1.7(b)).

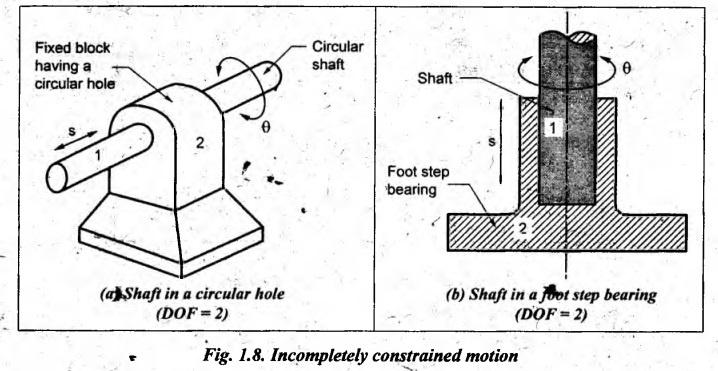
2. Incompletely Constrained Motion
• When the relative motion
between two links can take place in more than one direction, then the motion is
called an incompletely constrained motion.
• Practical examples:
A circular shaft moving in a circular hole (Fig.1.8(a)) and a circular shaft
moving in a foot-step bearing (Fig.1.8(b)) have two types of motions: (a)
rotary, and (b) reciprocating (sliding). Since both motions of rotation and
sliding can take place. simultaneously, the motion is incompletely constrained.
3. Successfully Constrained Motion
• When the relative motion
between the links is not completely by itself, but it is achieved by some other
means, then the motion is said to be successfully or partially constrained
motion.
• Practical examples:
(i) The incompletely constrained motion of a circular shaft in a circular hole
(shown in Fig.1.8(a)) can be successfully constrained to a pure rotational
motion (without sliding motion) by providing a key way in the circular shaft,
as shown in Fig. 1.9(a).
(ii)
The completely constrained motion of a circular shaft in a foot-step bearing
(shown in Fig.1.8(b)) can be made successfully constrained to a rotational
motion only (without sliding motion) by using a load, as shown in Fig.1.9(b).
• It may be noted that in
actual practice, the degrees of freedom of a mechanism can be suppressed
(reduced) by means of applications of constraints on the motion of the links.

Theory of Machines: Unit I: Kinematics of Mechanisms : Tag: : Kinematics of Mechanisms - Theory of Machines - constrained motions
Related Topics
Related Subjects

Theory of Machines
ME3491 4th semester Mechanical Dept | 2021 Regulation | 4th Semester Mechanical Dept 2021 Regulation