Kinematics of Mechanisms - Theory of Machines
Angular velocity ratio Theorem
Kinematics of Mechanisms - Theory of Machines
The angular velocity ratio theorem states that the angular velocity ratio of two links relative to a third link is inversely proportional to the distances of their common instantaneous centre from their respective centres of rotation.
ANGULAR VELOCITY RATIO THEOREM
• Theorem:
The angular velocity ratio theorem states that the angular velocity ratio of
two links relative to a third link is inversely proportional to the distances
of their common instantaneous centre from their respective centres of rotation.
• Consider
a four-bar mechanism and locate all the instantaneous centres, as shown in with
angular velocity ω2 in clockwise direction, then line velocity of
the link 2 is given by

• Instead
of ω2, when ω3 is given, then the velocity of link 2 is
given by

• From
equations (i) and (ii), it can be stated that the velocity of a link in a
mechanism is equal to the product of the angular velocity and radius of
instantaneous centre at that instant.
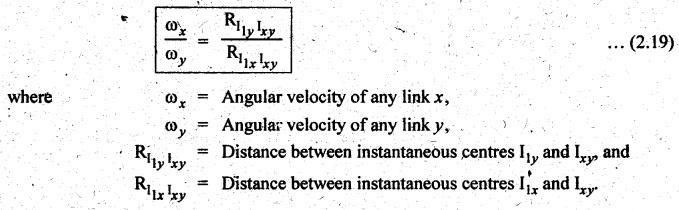
• The
generalised equation to find the velocity of any link x is given by

•
The angular velocity ratio for links 2 and 3 can be written from equation (i)
and (ii) as
Now
the generalized equation for angular velocity ratio is given by
Note
1. Centrode: The locus of all
instantaneous centres is known as centrode.
2. Space centrode: The locus of the
instantaneous centre in space during a definite motion of the body is called
the space centrode.
3. Body centrode: The locus of
instantaneous centre relative to the body itself is called the body centrode.
4. Instantaneous axis: A line drawn through
an instantaneous centre and perpendicular to the plane of motion is called
instantaneous axis.
5. Axode: The locus of instantaneous axis is known as axode.
Kinematics of Mechanisms - Theory of Machines : Tag: : Kinematics of Mechanisms - Theory of Machines - Angular velocity ratio Theorem