Theory of Machines: Unit I: Kinematics of Mechanisms
Acceleration of a rigid link
Kinematics of Mechanisms - Theory of Machines
We know that acceleration is the rate of change with respect to time.
II. ACCELERATION ANALYSIS BY RELATIVE ACCELERATION METHOD
ACCELERATION OF A RIGID LINK
• We know that acceleration is the
rate of change with respect to time.
• Like velocity,
acceleration is also a vector quantity as it has both magnitude and direction.
• Consider a link AB
rotating about point A in clockwise direction, as shown in Fig.2.12(a). Let ω
be the angular velocity and a be the angular acceleration of point B with
respect to A.
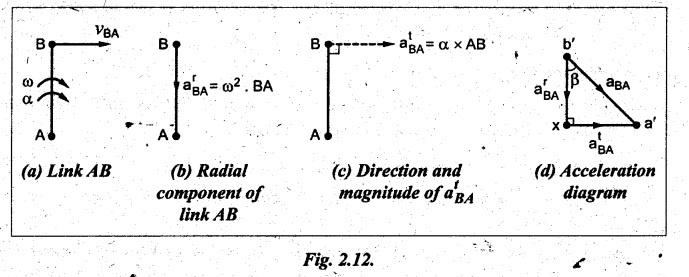
• As discussed already, the
velocity of point B with respect to A (vBA) is always perpendicular
to the link AB, as shown in Fig.2.12(a).
1. Components of Acceleration
Since
the velocity of a particle changes in both magnitude and direction, therefore
it has two components of acceleration.
1. Radial (or
centripetal) component, and
2. Tangential
component.
1. Radial (or
Centripetal) Component (arBA):
• The radial or centripetal
component of acceleration acts in the direction parallel to the link and its
direction is towards the centre of rotation, as shown in Fig.2.12(b).
• Magnitude:
The magnitude of the radial component of acceleration of link AB is given by

• Direction:
The direction of arBA is towards the centre of
rotation A, as shown in Fig.2.12(b). In other words, it acts perpendicular to
the velocity of link AB.
2. Tangential
Component (atBA):
• The tangential component
of acceleration acts in the direction perpendicular to the link,
as shown in Fig.2.12(c).
• Magnitude:
The magnitude of the tangential component of acceleration of link AB is given
by

• Direction:
The direction of atAB is perpendicular to link AB,
as shown in Fig.2.12(c). In other words, it acts parallel to the velocity of
link AB, vBA.
Total
Acceleration, aBA:
• The total acceleration of
point B with respect to A is the vector sum of its radial component and
tangential component, as shown in Fig.2.12(d).

Note
1. If a link rotates
at a constant angular velocity, then the tangential component of acceleration
a' becomes zero.
2. If a link (like
slider/piston) moves in a straight line, then the radial component of
acceleration ar becomes zero. This is because the straight
line motion may be assumed as rotational motion having infinite radius; so 
2. Acceleration Image of a Link
The
acceleration diagram of a link AB can be drawn as shown in Fig.2.12(d), using
the following procedure.
1.
From any arbitrary point b', draw vector b'x such that b'x'
= arBA in the direction parallel to BA (from B to
A) to represent the radial component of B with respect to A (i.e., arBA).
2.
Now from point x2 draw vector xa' such that atBA
in the direction perpendicular to BA to represent the tangential component of B
with respect to A (i.e., atBA).
3. Join points a' and b' to obtain vector b'a'. The vector b'a' represents the total acceleration of B with respect to A (i.e., aBA). The vector b'a' is known as the acceleration image of link AB.
Theory of Machines: Unit I: Kinematics of Mechanisms : Tag: : Kinematics of Mechanisms - Theory of Machines - Acceleration of a rigid link
Related Topics
Related Subjects

Theory of Machines
ME3491 4th semester Mechanical Dept | 2021 Regulation | 4th Semester Mechanical Dept 2021 Regulation